")
Përmbajtje:
- Hapi 1: Shikoni Projektin Tim Duke Punuar
- Hapi 2: Merrni të gjithë materialin
- Hapi 3: Ngarko Programin në Bordin Arduino
- Hapi 4: Shtroni Gjurmët dhe Bëni Paraqitjen
- Hapi 5: Një skemë qarkore është gjithmonë e dobishme
- Hapi 6: Lidhni daljet në dalje të bordit të drejtuesve L298N
- Hapi 7: Lidhni gjurmën e furnizuesit të energjisë me daljen tjetër të bordit të drejtuesit L298N
- Hapi 8: Lidhni bordin e drejtuesit L298N me kunjat e energjisë të bordit Arduino
- Hapi 9: Lidheni Sensorin me Bordin Arduino
- Hapi 10: Lidhni kunjat hyrëse të drejtuesit të motorit në bordin Arduino
- Hapi 11: Vendoseni trenin në binarë
- Hapi 12: Ndizni konfigurimin
- Hapi 13: Dshtë bërë
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 12:11.
- E modifikuara e fundit 2025-01-23 15:10.

Bërja e modeleve të modelit të trenit është një hobi i shkëlqyeshëm, automatizimi i tij do ta bëjë atë shumë më të mirë! Le të hedhim një vështrim në disa nga avantazhet e automatizimit të tij:
- Funksionim me kosto të ulët: I gjithë paraqitja kontrollohet nga një mikrokontrollues Arduino, duke përdorur një drejtues motori L298N, kostoja e tyre është pothuajse asgjë në krahasim me mbytjet tradicionale të kontrollit të trenit dhe paketat e energjisë.
- Ideale për tu vendosur në një ekran: Meqenëse nuk kërkohet ndërhyrje njerëzore për të mbajtur një kontroll në paraqitjen, mund ta përdorni në një ekran ku nuk mund të jeni gjithmonë të pranishëm për të kontrolluar trenin dhe daljet.
- E shkëlqyeshme për hobistët e mikrokontrolluesve: Nëse jeni ose dëshironi të filloni me Arduino dhe programim, ky është një projekt i shkëlqyeshëm për ju që të praktikoni aftësitë tuaja.
Nëse jeni të interesuar, mund të kontrolloni edhe versionin e mëparshëm të këtij projekti i cili është edhe më i thjeshtë.
Pra, pa zhurmë të mëtejshme, le të fillojmë!
Hapi 1: Shikoni Projektin Tim Duke Punuar


Hapi 2: Merrni të gjithë materialin

Për të filluar, sigurohuni që keni të gjitha sa më poshtë:
- Preferohet një bord i mikrokontrolluesve Arduino, UNO.
- Një dërrasë motorike L298N me motor U-H të dyfishtë.
- 6 tela bluzë meshkuj në meshkuj.
- 7 tela bluzë meshkuj në femra.
- Një kaçavidë.
- Një përshtatës i furnizimit me energji 12 volt-DC.
- Një segment gjurmësh me sensorin e afërsisë IR të bashkangjitur në pjesën e poshtme (kam përdorur një udhë Kato S62)
Hapi 3: Ngarko Programin në Bordin Arduino
Shkarkoni Arduino IDE nga këtu nëse nuk e keni në kompjuterin tuaj. Pastaj shkarkoni dhe hapni skedarin e dhënë.
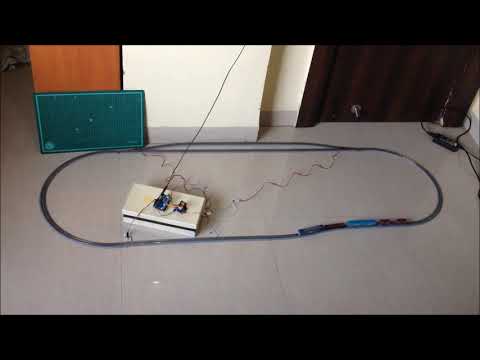
Hapi 4: Shtroni Gjurmët dhe Bëni Paraqitjen

Bëni një lak ovale me një mur anësor kalues disi siç tregohet më sipër. Sigurohuni që distanca midis pistës së sensorit dhe daljes së parë që treni do të kalojë pas kalimit të shiritit të sensorit është më e madhe se gjatësia e trenit në mënyrë që asnjë pjesë e trenit të mos jetë mbi shinën e sensorit kur kalon daljen.
Hapi 5: Një skemë qarkore është gjithmonë e dobishme

Klikoni mbi imazhin për të marrë një pamje të plotë. Sigurohuni që të kaloni skemën e qarkut të plotë dhe të gjitha detajet para se të vazhdoni.
Hapi 6: Lidhni daljet në dalje të bordit të drejtuesve L298N




Lidhni telat e kuq dhe të zi të të dy daljeve përkatësisht me njëri -tjetrin, duke rezultuar në një lidhje paralele. Pastaj, lidhni telat e kuq me out4 dhe telat e zinj me terminalin out3 të bordit të drejtuesit të motorit.
Hapi 7: Lidhni gjurmën e furnizuesit të energjisë me daljen tjetër të bordit të drejtuesit L298N


Lidhni tela të bardhë të furnizuesit të energjisë në out1 dhe tela blu në terminalin out2 të bordit të drejtuesit të motorit.
Hapi 8: Lidhni bordin e drejtuesit L298N me kunjat e energjisë të bordit Arduino

Lidhni kunjin 12 volt me kunjin VIN të bordit Arduino, kunjin GND me kunjin GND të bordit Arduino, dhe mundësisht, kunjën 5 volt të drejtuesit të motorit me kunjën 5 volt të bordit Arduino.
Hapi 9: Lidheni Sensorin me Bordin Arduino

Lidhni kunjin VCC të sensorit në kunjin 5 volt të bordit Arduino, kunjin GND në kunjin GND të bordit Arduino dhe kunjin OUT në kunjin A0 të bordit Arduino.
Hapi 10: Lidhni kunjat hyrëse të drejtuesit të motorit në bordin Arduino

Lidhni kunjat dixhitale të bordit Arduino me kunjat hyrëse të bordit të drejtuesit të motorit si më poshtë:
- D9 në IN1
- D10 në IN2
- D11 në IN3
- D12 në IN4
Hapi 11: Vendoseni trenin në binarë

Pasi të keni kontrolluar të gjitha lidhjet e telave, vendoseni trenin në mur anësor.
Hapi 12: Ndizni konfigurimin

Ndizni konfigurimin dhe sigurohuni që pjesëmarrja të kalojë në anën, nëse jo, atëherë thjesht ndryshoni lidhjet e daljeve të bëra me drejtuesin e motorit. Gjithashtu, sigurohuni që treni të fillojë të lëvizë në drejtimin përpara. Kthejeni lidhjen e pistës ushqyese me drejtuesin e motorit nëse treni lëviz në drejtim të gabuar.
Hapi 13: Dshtë bërë
Projekti ka përfunduar, tani për tani. Ju mund të njomni kodin Arduino për të ndryshuar funksionalitetin e paraqitjes, shtoni më shumë anash, gjithçka është e personalizueshme! Do të doja të dija për çdo modifikim që bëni në këtë projekt, më tregoni në komentet më poshtë. Gjithe te mirat!
Recommended:
Modeli i Automatizuar i Paraqitjes së Hekurudhave që Drejton Dy Trena (V2.0) - Bazuar në Arduino: 15 hapa (me fotografi)
 - Bazuar në Arduino: 15 hapa (me fotografi)")
Modeli i Automatizuar Paraqitja e Hekurudhave që Drejton Dy Trena (V2.0) | Bazuar në Arduino: Automatizimi i modeleve të modelit të hekurudhave duke përdorur mikrokontrolluesit Arduino është një mënyrë e shkëlqyeshme për të bashkuar mikrokontrolluesit, programimin dhe modelimin e hekurudhave në një hobi. Ka një mori projektesh të disponueshme për drejtimin e një treni në mënyrë autonome në një model hekurudhor
Modeli i Automatizuar i Paraqitjes së Hekurudhave me Lakë të Anasjelltë: 14 Hapa

Modeli i Automatizuar i Paraqitjes së Hekurudhave Me Lakë të Anasjelltë: Në njërën nga udhëzimet e mia të mëparshme, unë tregova se si të krijoj një Hekurudhë të Simptomoduar të Modifikuar nga pika në pikë. Një nga disavantazhet kryesore të atij projekti ishte se treni duhej të lëvizte në drejtim të kundërt për t'u kthyer në pikën e fillimit. R
Modeli i paraqitjes së hekurudhave me anë të automatizuar të kalimit (V2.0): 13 hapa (me fotografi)
: 13 hapa (me fotografi)")
Modeli i Paraqitjes së Hekurudhave me Anën e Kalimit të Automatizuar (V2.0): Ky projekt është një azhurnim i një prej projekteve të mëparshëm të modelit të automatizimit të hekurudhave, Modeli i Paraqitjes së Hekurudhave me Siding të Automatizuar. Ky version shton veçorinë e bashkimit dhe shkëputjes së lokomotivës me mjetet lëvizëse. Operacioni i
Modeli i Automatizuar i Paraqitjes së Hekurudhave që Drejton Dy Trena: 9 Hapa

Modeli i Automatizuar i Paraqitjes së Hekurudhave që Drejton Dy Trena: Bëra një Paraqitje të Automatizuar të Trenit të Modelit me Anën Kaluese një kohë më parë. Me kërkesë të një anëtari tjetër, e bëra këtë të udhëzueshme. Kjo është disi e ngjashme me projektin e përmendur më parë. Paraqitja strehon dy trena dhe i drejton ato alternativisht
Modeli i thjeshtë i modelit të automatizuar të hekurudhës me anën e oborrit: 11 hapa

Modeli i thjeshtë i modelit të automatizuar hekurudhor me anën e oborrit: Ky projekt është një version i azhurnuar i një prej projekteve të mia të mëparshme. Kjo përdor një mikrokontrollues Arduino, një platformë e madhe prototipimi me burim të hapur, për të automatizuar një model modeli të hekurudhës. Paraqitja përfshin një lak të thjeshtë ovale dhe një krunde me anën e oborrit