")
Përmbajtje:
- Hapi 1: Si funksionon doza
- Hapi 2: Ju lutemi vini re para fillimit
- Hapi 3: Mblidhni të gjithë materialin
- Hapi 4: Variuos Dimensionet
- Hapi 5: Krijimi i trupit
- Hapi 6: Montimi i Aktivatorit dhe Prodhimi i Pjatave
- Hapi 7: Manualizimi i Karakteristikave të Valës
- Hapi 8: Lidhjet dhe programi elektronik
- Hapi 9: Kontrolli i Aktivizuesve nga Programi i Drejtuar nga Menuja
- Hapi 10: Si të përdorni rezervuarin e valëve
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 12:24.
- E modifikuara e fundit 2025-01-23 15:10.



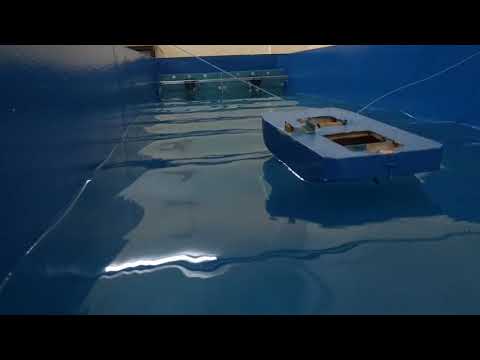
Një rezervuar valësh është një strukturë laboratorike për vëzhgimin e sjelljes së valëve sipërfaqësore. Rezervuari tipik i valëve është një kuti e mbushur me lëng, zakonisht ujë, duke lënë hapësirë të hapur ose të mbushur me ajër në krye. Në njërin skaj të rezervuarit një aktivizues gjeneron valë; skaji tjetër zakonisht ka një sipërfaqe që absorbon valë.
Zakonisht këto tanke kushtojnë shumë para kështu që unë u përpoqa të bëj një zgjidhje vërtet të lirë për studentët që duan të përdorin rezervuarin për të testuar projektet e tyre.
Hapi 1: Si funksionon doza
Pra, projekti përbëhet nga dy aktivizues të bërë duke përdorur nxjerrje alumini me v slot.
Një motor stepper është i lidhur me secilin aktivizues dhe të dy motorët kontrollohen nga i njëjti motor stepper, kështu që nuk ka vonesë.
Arduino përdoret për të kontrolluar drejtuesin e motorit. Një program i drejtuar nga menyja përdoret për të dhënë kontribut në arduionin e lidhur përmes kompjuterit. Pllakat e aktivizuesit janë montuar në portën v-slot e cila do të kthehet mbrapa sapo të fillojnë motorët dhe kjo lëvizje para dhe mbrapa e pllakave gjeneron valë brenda rezervuarit. Lartësia e valës dhe gjatësia e valës mund të ndryshohen duke ndryshuar shpejtësinë e motor nëpërmjet arduino.
Hapi 2: Ju lutemi vini re para fillimit

Unë nuk kam mbuluar shumicën e gjërave të vogla se si të përdor arduino ose si të bëj saldim për ta mbajtur këtë mësim të vogël dhe të lehtë për t'u kuptuar. Shumica e gjërave që mungojnë do të pastrohen në imazhe dhe video. Ju lutemi më dërgoni mesazh nëse ka ndonjë problem ose pyetje në lidhje me projektin.
Hapi 3: Mblidhni të gjithë materialin
- Mikro kontrollues Arduino
- 2*Stepper motor (2.8 kgcm çift rrotullues për motor)
- Shofer 1*Stepper motor
- Sistemi i portave me çarë 2*V
- Pllaka çeliku ose hekuri për trupin e rezervuarit
- L-ngurtësues për të mbështetur trupin
- Fibra ose fletë plastike për të bërë pllakën e aktivizuesit
- Tela furnizimi me energji DC 48 volt
Unë nuk kam përfshirë materiale për v-slot gantry sepse lista do të jetë shumë e madhe atëherë vetëm në google v-slot do të merrni shumë video në lidhje me mënyrën e montimit të tij duke përdorur nxjerrje alumini 2040. Kapaciteti i motorit dhe kapaciteti i furnizimit me energji do të ndryshojnë nëse doni të mbani më shumë ngarkesë.
Dimensionet e rezervuarit
Gjatësia 5.50 m
Gjerësia 1.07 m
Thellësia 0.50 m
Hapi 4: Variuos Dimensionet



Për t'i bërë gjërat më të thjeshta dhe më të shkurtra, unë kam marrë imazhe të përbërësve të ndryshëm me një shkallë, në mënyrë që të shihni madhësitë e tyre.
Hapi 5: Krijimi i trupit




Trupi është bërë nga fletë gize me trashësi 3 mm.
Gjerësia e rezervuarit është 1.10 metra, gjatësia 5 metra dhe lartësia 0.5 metra.
Trupi i rezervuarit është i përbërë nga çeliku i butë me ngurtësues rreth tij kudo që është e nevojshme. Pllaka të buta çeliku u përkulën dhe u prenë në seksione të ndryshme sipas dimensioneve të rezervuarit. Këto seksione u ngritën më pas duke i bashkuar ato së bashku. Ngurtësuesit gjithashtu u ngjitën së bashku për ta bërë strukturën më të fortë.
Pllaka e parë u përkul në madhësinë e dëshiruar në seksione të ndryshme dhe më pas këto pjesë u ngjitën së bashku për të ngritur trupin. Ngurtësuesit janë shtuar pasi dimensionet e ngurtësuesve mbështetës janë treguar në figurë
Hapi 6: Montimi i Aktivatorit dhe Prodhimi i Pjatave



aktivizuesit janë bërë duke përdorur sisteme v-slot. Këto janë me të vërtetë të lira dhe të lehta për tu ndërtuar, mund të kërkoni me google në internet se si të montoni njërën nga këto. Unë kam përdorur vidë plumbi në vend të rripit për të rritur kapacitetin mbajtës të ngarkesës. Unë nuk kam përfshirë mësimin e asamblesë sepse do të ndryshojë sipas ngarkesës që dëshironi të mbani. Për mua ngarkesa me shpejtësinë maksimale ishte rreth 14Kg.
Pllaka e aktivizuesit është ndërtuar duke përdorur fletë frp, akriliku gjithashtu mund të përdoret. Një kornizë çeliku inox është ndërtuar për të mbështetur fletën frp.
Kornizë vozis
Korniza e Paddle është e përbërë nga çelik inox. Çeliku inox është i papërshkueshëm nga uji dhe kështu do t'i rezistojë korrozionit. Për kornizën e vozitjes u përdor seksion katror prej 2 x 2 cm. Një kornizë e fortë ishte e nevojshme pasi shumë ngarkesë ciklike do të jetë veprim në vozis gjatë gjenerimit të valës. Korniza e çelikut nuk do të përkulet dhe kështu do të gjenerojë valë të rregullt sinusoidale.
Ashtë bërë një pirg L me porosi për të lidhur pllakën e aktivizuesit me pllakën e portës në sistemin vslot.
Hapi 7: Manualizimi i Karakteristikave të Valës



Rezervuari mund të gjenerojë lartësi të ndryshme valësh sipas kërkesës. Për të gjeneruar lartësi të ndryshme të valës RPM e motorit rregullohet. Për të marrë lartësinë e madhe të valës RPM e motorit rritet, kjo gjithashtu zvogëlon gjatësinë e valës së valës. Ngjashëm me rritjen e gjatësisë së valës RPM të motorit është zvogëluar. RPM mund të rregullohet duke zgjedhur opsionin e personalizuar RPM nga menyja.
RPM maksimale = 250
RPM minimale = 50
Më poshtë është shembulli i lartësisë së valëve të ndryshme të regjistruara nga përshpejtuesi. Imazhi i parë është të dhënat e regjistruara në RPM të larta si rezultat që marrim lartësi të madhe të valës. Imazhi i dytë tregon uljen e lartësisë së valës dhe rritjen e gjatësisë së valës të grafikut, të cilat janë të dhënat e regjistruara nga akceleromerteri dhe përfaqëson karakteristikat aktuale të valës së valës së gjeneruar.
Hapi 8: Lidhjet dhe programi elektronik

Ndërsa lidhni furnizimin me energji, kini kujdes polariteti i lidhjes lidhni terminalin pozitiv me pozitiv dhe negativ në negativ. Bëni lidhjet për motorin dhe drejtuesin siç tregohet në figurë. Pasi të gjitha lidhjet të jenë të përshtatshme, lidhni kunjat e mikrokontrolluesit (8, 9, 10 dhe 11) drejtuesit të motorit stepper. Lidhni mikrokontrolluesin me një kompjuter me USB. Filloni Arduino IDE> Monitor serik.
Programi përfshihet në mësimdhënie dhe është vetë shpjegues, ai përdor shkronjat e ndërrimit dhe nëse përndryshe deklaratat për të funksionuar. Reallyshtë vërtet e thjeshtë që një nxënës i shkollës së mesme gjithashtu mund ta kuptojë atë.
Këtu është lidhja e google drive me programin
Programi i kontrollit Arduino
Hapi 9: Kontrolli i Aktivizuesve nga Programi i Drejtuar nga Menuja

Pasi mikrokontrolluesi të jetë lidhur siç duhet me kompjuterin, do të keni një menu të ngjashme. Për të zgjedhur opsionin, thjesht shkruani numrin pranë opsionit dhe shtypni enter
Shembull:-
Për të zgjedhur "Aktivizo në frekuencën maksimale", shkruani 1 dhe shtypni enter.
Për të ndaluar veprimin, shkruani 0 dhe shtypni enter.
Ndalesa emergjente
Për të ndaluar aktivizuesin shtypni zero "0" dhe futni.
Për të bërë një ndalesë emergjente ose shtypni rivendosjen në mikrokontrollues ose ndërprisni furnizimin me energji elektrike.
Hapi 10: Si të përdorni rezervuarin e valëve

Ky rezervuar është bërë si pjesë e projektit tim të madh. Rezervuari është testuar për gjenerimin e valëve të ndryshme të rregullta në gjendjen e detit të kokës për një model maune të shkallëzuar. Testimi i valës së valës ishte i suksesshëm. Kostoja e përgjithshme për zhvillimin e këtij projekti ishte Rs. 81, 000 (Vetëm Tetëdhjetë e Një mijë) në një kohëzgjatje prej dy muajsh.
Për çdo pyetje ju lutemi komentoni.

Çmimi i parë në Konkursin e Ujit
Recommended:
DIY -- Si të bëni një robot merimangë i cili mund të kontrollohet duke përdorur smartphone duke përdorur Arduino Uno: 6 hapa

DIY || Si të bëni një robot merimangë i cili mund të kontrollohet duke përdorur smartphone duke përdorur Arduino Uno: Ndërsa bëni një robot merimangë, mund të mësoni shumë gjëra për robotikën. Ashtu si bërja e robotëve është edhe argëtuese, edhe sfiduese. Në këtë video ne do t'ju tregojmë se si të bëni një robot Spider, të cilin mund ta përdorim duke përdorur smartphone -in tonë (Androi
Kontrolli i udhëhequr në të gjithë botën duke përdorur internetin duke përdorur Arduino: 4 hapa

Kontrolli i udhëhequr në të gjithë botën duke përdorur internetin duke përdorur Arduino: Përshëndetje, unë jam Rithik. Ne do të bëjmë një led të kontrolluar nga interneti duke përdorur telefonin tuaj. Ne do të përdorim softuer si Arduino IDE dhe Blynk. Simpleshtë e thjeshtë dhe nëse keni sukses mund të kontrolloni sa më shumë komponentë elektronikë që dëshironi Gjërat që Ne Nevojë: Hardware:
Monitorimi i përshpejtimit duke përdorur Raspberry Pi dhe AIS328DQTR duke përdorur Python: 6 hapa

Monitorimi i përshpejtimit duke përdorur Raspberry Pi dhe AIS328DQTR Duke përdorur Python: Përshpejtimi është i kufizuar, mendoj sipas disa ligjeve të Fizikës.- Terry Riley Një cheetah përdor përshpejtim të mahnitshëm dhe ndryshime të shpejta në shpejtësi kur ndiqni. Krijesa më e shpejtë në breg, herë pas here, përdor ritmin e saj të lartë për të kapur prenë.
Si të bëni një dron duke përdorur Arduino UNO - Bëni një kuadopter duke përdorur mikrokontrollues: 8 hapa (me fotografi)
")
Si të bëni një dron duke përdorur Arduino UNO | Bëni një Quadcopter Duke përdorur Mikrokontrolluesin: HyrjeVizitoni Kanalin Tim në YoutubeNjë drone është një vegël (produkt) shumë e shtrenjtë për të blerë. Në këtë postim do të diskutoj, si ta bëj me çmim të ulët ?? Dhe si mund ta bëni tuajin si ky me çmim të lirë … Epo në Indi të gjitha materialet (motorët, ESC -të
8 Kontrolli i stafetës me NodeMCU dhe Marrës IR duke përdorur WiFi dhe IR Telekomandë dhe Aplikacion Android: 5 hapa (me fotografi)
")
8 Rele Control me NodeMCU dhe IR Receiver Using WiFi and IR Remote and Android App: Kontrolli i 8 ndërprerësve të stafetave duke përdorur nodemcu dhe marrësin ir mbi wifi dhe ir aplikacionin e largët dhe android. Ir i largët punon pavarësisht nga lidhja wifi. K ISTU ASHT A KLIKIM I VERSIONIT TP PPRDITSUAR KETU